| | KAP: Kamerahalterung Nr.
3, modular
 . .
|
Eine Digitalkamera unterm Drachen ? Das passt !
Diese Kamerahalterung ist eine Weiterentwicklung der Kap
Nr. 2. Ziel war es, neben der bisherigen Analog-Kamera mit der gleichen KAP
auch eine Digitalkamera benutzen zu können. Der Vorteil einer Digitalkamera bei
der Luftbildphotographie liegt auf der Hand: Da sich die Kamera sehr stark in
der Luft bewegt, sind 90% der Bilder unbrauchbar, man hat nur den Himmel oder
eine echt uninteressante Wiese mit nichts drauf aufgenommen. Bei der
Digitalkamera tut das nicht weh. Hier kostet das Bild keinen Cent und (je nach
Speicherkarte) kann ein Vielfaches an Bildern geschossen werden ohne die Kamera
einholen zu müssen. Ein weiterer Vorteil ist, dass man direkt nach dem Flug mit
den Aufnahmen belohnt wird und diese gleich anschauen kann.
Ein Nachteil der Digitalkamera soll auch nicht unerwähnt bleiben: Sie
reagiert sehr viel empfindlicher auf Bewegung und liefert daher mehr unscharfe,
verwischte Bilder als eine herkömmliche Kamera.

|
|
Modulbauweise:
Auf der bisherigen KAP Nr. 2 war die
Analog-Kamera fest in der horizontalen Lage am Boden fixiert. Die neue
Modulbauweise erfordert für jede Kamera eine eigene Aluminium-Aufnahme, die
optimal an die Kamera angepasst ist. Daher sitzt auch der Servomotor für den
Auslöser mit auf dem Kameramodul: einmal ist es ein rein mechanischer
Auslöser, beim zweiten ein elektrischer Auslöser, wie er schon in KAP Nr. 2
verwendet wurde.
Die eigentliche Kamera-Aufhängung hat lediglich 2 vertikal angebrachte
Bohrlöcher zu Aufnahme der Module und einen freien Steckplatz im Empfänger, in
den der Auslöse-Servor eingestöpselt wird.
Beide Kamera-Aufnahmen wurden so konstruiert, dass Sie mit je 2 schräg
versetzten Flügelschrauben horizontal (für Landscape-Aufnahmen) und vertikal
(Hochkant-Aufnahmen) an der KAP-RIG befestigt werden können. Vorstellbar wäre
auch ein weiterer Servo gewesen, der die 90-Grad Drehung am Himmel ermöglicht,
aber das kostet wieder Gewicht.
Auf dem Bild rechts sieht man beide Module in der Vorder- und Hinteransicht.
Bei der Digitalkamera wurden natürlich entsprechende Ausschnitte gesägt, damit
man die Bilder gleich im Display anschauen kann ohne die Kamera ausbauen zu
müssen.
Ansonsten ist diese Kameraufaufhängung um einiges kompakter und etwas leichter
als die Vorgängerversion. Prinzipiell gilt aber alles schon Gesagt zu KAP Nr.
2:
|
 |
Generelle Funktionsweise:
In die Leine eines genügend zugstarken Drachens (Cody, großer Rokkaku) wird die Kameraaufhängung etwa 5-10 Meter unterhalb des
Drachens eingehängt und dann vom Drachen mit in die Luft gehoben.
Hat man die gewünschte Höhe erreicht, so erlaubt die hier vorgestellte Kamera das exakte Ausrichten der Kamera in alle
Richtungen und das Auslösen per Funkfernbedienung. Durch die
Verwendung einer Kamera mit Motor für den Weitertransport der
Bilder oder die Verwendung einer Digital-Kamera kann so ein ganzer Film oder
noch mehr Bilder auf einer Speicherkarte in der Luft belichtet werden, ohne
den Drachen wieder einholen zu müssen,
 Baumaterial: Baumaterial:
Beim Bau des Gehäuses wurde Wert auf geringes Gewicht,
leichte Verarbeitung der verwendeten Stoffe und auf bezahlbare
Materialien gelegt. Das Gehäuse selbst wurde daher aus
handelsüblichen Aluminium-Kantstücken zusammengesetzt, die
jeder Baumarkt vorrätig hat. Die Servos stammen ebenso wie die
verwendeten Zahnräder von Conrad-Elektronik. Desweiteren finden
normale Mikroschalter aus dem Elektronikhandel Verwendung. Das
Herzstück ist die Kamera: Ich verwende als Digitalkamera eine Digital Ixus und
als Analog-Kamera die Olympus [mü]1, die
ich extra für diesen Einsatz gebraucht erworben habe. Man kann aber
natürlich jedes andere Kameramodell benutzen, Hauptsache, die
Kamera verfügt über einen automatischen Filmtransport und
möglichst über ein Weitwinkelobjektiv. Für die Fernsteuerung
kann jede Fernsteuerung aus dem Modellbau benutzt werden. Mindestvoraussetzung sind 3 Funkkanäle (Hoch/Runter,
Links/Rechts, Auslöser). Ich benutze ein gebrauchtes Modell von
Robbe, die eigentlich für die Steuerung von Helikoptern gedacht
ist und damit mit der KAP etwas unterfordert ist :-)
Funkbedienung
Je ein Kanal der Fernsteuerung steuert die
Links-Rechts-Bewegung, die Hoch-Runter-Bewegung und einen
motorisierten Auslöser.
Für die Links-Rechts-Bewegung wurde an der Aufhängungsachse ein
Zahnrad fest montiert. In dieses Zahnrad greift ein kleines
Zahnrad ein, das direkt auf der Achse eines Servomotors montiert
ist, der wiederum schon am schwenkbaren Kameragehäuse montiert
ist. Somit kann sich das Gehäuse über die kleine Übersetzung
der beiden Zahnräder um die Aufhängungsachse drehen. Ein
Problem dabei ist, dass alle mir bekannten Servomotoren keine
360-Grad Rotation ermöglichen sondern nur einen maximalen
Ausschlag von ca. 160 Grad in beide Richtungen. Durch einen
entsprechenden Umbau (siehe Anhang A) ist aber
eine endlose Rotation möglich.
Die Hoch-Runter-Bewegung wurde gegenüber der Kap Nr. 2 verbessert: Hier wurden
die Zahnräder ersetzt durch einen Schieber, der über den Servo nach oben oder
unten geschoben wird. Der Vorteil dieser Lösung ist, dass die Kamera nicht zu
weit nach unten oder oben gedreht wird und dadurch an einem Teil des Gehäuses anstößt.
Die Auslenkung ist durch diese Konstruktion exakt voreingestellt.
Der dritte Servo löst die Aufnahme aus. Dabei wird zwischen den beiden
Kamera-Modulen unterschieden:
Analog--Kamera: Der Servo für den Auslöser ist ein nicht umgebauter
Servomotor, der über einen kleinen Hebel und ein kurzes Stück
Schnur 2 Mikroschalter kurz hintereinander auslöst. Die beiden
Kontakte entsprechen der üblichen Bedienung moderner Kameras:
der erste Kontakt entspricht den Auslöser der Kamera leicht
antippen um die Schärfe des Autofocus einzustellen. Der zweite
Kontakt entspricht dem endgültigen Durchdrücken des Auslösers
um die Belichtung zu starten (näheres zu dieser eher unüblichen
Lösung siehe Anhang B).
Digital-Kamera: Hier war mir die Kamera zu schade, ich wollte hier keine Drähte
einlöten (verständlich, oder?). Daher sitzt hier ein Servo-Motor über der
Kamera und an der Achse wurde eine zurecht geschnittene Hälfte einer
Benzin-Kanister-Dichtung angeschraubt, deren eines Ende frei in der Luft schwebt
und durch den Motor auf den Auslöser der Kamera drücken kann. Die Servos
entwickeln doch eine ganz schöne Kraft, Durch die Gummi-Dichtung wird die Kraft
aber nicht in voller Stärke auf den Auslöser übertragen und schont damit die
Kamera.

Die Picavet-Aufhängung
Bei der Aufhängung habe ich mich an der heute üblichen Picavet-Aufhängung
angepasst. Ein anschraubbares Kreuz aus Aluminium-U-Schienen hat an jeder Seite
ein kleines Rad angebracht, durch das eine Schnur laufen kann. Alle Räder
zeigen dabei in die gleiche Richtung. An der Drachenleine werden im Abstand von
ca. 1 Meter auch je 2 dieser Räder angebracht. Nun verbindet eine lange Schnur
alle Räder, immer von oben an die Rig, wieder nach oben usw. Klingt
kompliziert, ist es aber nicht (siehe Bild). Dadurch, dass es EIN durchgehendes
Seil ist, kann die KAP sich immer in der Horizontalen ausrichten, unabhängig
von Steigungswinkel der Drachenleine. Die KAP-Rig pendelt dadurch weit weniger
als durch die Pendel-Lösung der bisherigen Aufhängung. Allerdings habe ich
noch keine optimalen Räder gefunden, die zudem nicht viel wiegen dürfen. Für
Tipps bin ich jederzeit dankbar!
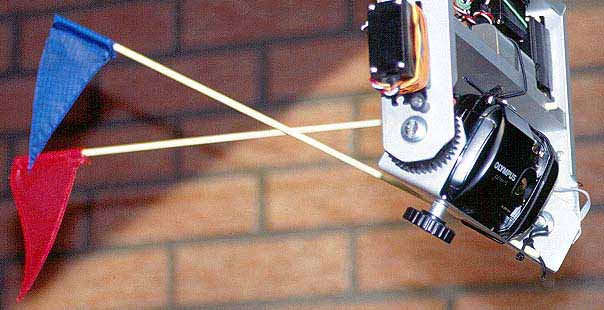
Weitere Kleinigkeiten
Das Problem der KAP ist, daß man nicht mehr sieht, in welche
Richtung die Kamera zeigt sobald sie mehr als 40  Meter in die Luft
gelassen wurde. Ich habe das Problem etwas entschärft, indem ich
zwei verschiedenfarbige Wimpel genäht habe, die über zwei
Glasfaserstäbe horizontal nach hinten zeigend an der Kamera-RIG
angebracht werden. Dabei ist, wie auf dem Bildrechts gut zu
erkennen, ein roter Wimpel fest am oberen Teil des Gehäuses
angebracht, während der blaue Wimpel an dem beweglichen Teil
neben der Kamera angebracht ist. Dadurch kann man vom Boden aus
noch recht lange erkennen, in welche Richtung und mit welcher
Neigung man gerade photographiert. Meter in die Luft
gelassen wurde. Ich habe das Problem etwas entschärft, indem ich
zwei verschiedenfarbige Wimpel genäht habe, die über zwei
Glasfaserstäbe horizontal nach hinten zeigend an der Kamera-RIG
angebracht werden. Dabei ist, wie auf dem Bildrechts gut zu
erkennen, ein roter Wimpel fest am oberen Teil des Gehäuses
angebracht, während der blaue Wimpel an dem beweglichen Teil
neben der Kamera angebracht ist. Dadurch kann man vom Boden aus
noch recht lange erkennen, in welche Richtung und mit welcher
Neigung man gerade photographiert.
 Damit ich bei passendem Wind und
Sonnenschein alles schnell griffbereit habe, habe ich alles, was
ich für die KAP brauche in einem alten Photokoffer
untergebracht. Dabei sind immer: Damit ich bei passendem Wind und
Sonnenschein alles schnell griffbereit habe, habe ich alles, was
ich für die KAP brauche in einem alten Photokoffer
untergebracht. Dabei sind immer:
- Die KAP-RIG (logisch:-)
- Die beiden Kamera-Module
- Die Picavet--Aufhängung
- Die Fernbedienung
- Ein Erd-Anker, falls kein Helfer für den Drachen dabei ist
- Die Wimpel zur Richtungsausrichtung
- Ein Fernglas um zu sehen, was da oben genau abgeht .-)
- Linsenpinsel
- Ersatzfilme und Speicherkarte
Nur der Zugdrache ist nicht im Paket. Dieser wird je nach
Windverhältnissen ausgesucht. Normalerweise sind es zwei Drachen
die ich derzeit verwende: ein Deltadrachen
sowie meinen großen Multiflare
(allerdings brauche ich für diesen Drachen einen Helfer).
Nachbau:
Der Nachbau der hier vorgestellten Kamerahalterung ist ausdrücklich
erlaubt und gewünscht !
Anhang A: Umbau der Servomotoren
Eine Grundanforderung für die verwendeten Servos ist eine
Drehung um 360 Grad. Leider ist mir kein solches Servo auf dem
Markt bekannt, so daß man gezwungen ist ein handelsübliches
Servo zu modifizieren. Durch sehr interessante KAP-Kontakte im
Internet (siehe meine Linkseite) war der Umbau kein Problem mehr:
Ich benutze die S21-Servos von Conrad-Elektronik, die preislich
sehr interessant sind und sich hervorragend für den kleinen
Umbau eignen. Um eine 360-Grad Rotation zu erreichen ist das
Servo zu öffnen. Beim S21-Servo ist die Hauptachse mit dem
Zahnrad fest mit einem Potentiometer verbunden, der normalerweise
die Rückstellung der Hauptachse in die Nullstellung ermöglicht.
Da eben diese Rückstellung nicht erwünscht ist, wird die Achse
dieses Potentiometers so abgesägt, daß sie nicht mehr in das
Zahnrad der Hauptachse greift. Dadurch ist zum einen der
Links-Rechts-Anschlag des Potentiometers entfernt und zum zweiten
erfolgt nun nach einer Auslenkung keine Rückstellung mehr.
Ausserdem sind im Gehäuseboden noch 2 weitere
Plastik-Anschlagstutzen wegzufeilen, die normalerweise die
Auslenkung der Servo-Achse begrenzen sollen. Fertig. Nach dem
Zusammenbau hat man nun ein Servo, daß in beide Richtungen
beliebig lange gedreht werden kann und das sich nicht wieder
zurückstellt, wenn man den Steuerknüppel lösläßt.
Anhang B: Realisierung des Auslösers
 Der Auslöser einer handelsüblichen aktuellen
Kamera hat normalerweise zwei Kontakte: Durch leichtes Antippen
des Auslösers wird der Autofocus und die Belichtung aktiviert.
durch festes Durchdrücken des Auslösers wird die eigentliche
Aufnahme ausgelöst. Diese zwei Kontakte habe ich über drei
Drähte durch direktes Einlöten in die Kamera über eine
Steckverbindung nach aussen geführt. Die Aufgabe der beiden
Kontakte übernehmen nun zwei Microschalter, die nebeneinander
fest an die KAP geschraubt wurden. Um diese Kontakte
ferngesteuert auszulösen sitzt ein kleines Blech unter den
Schaltern, das auf der einen Seite über ein kleines Gelenk an
den Mikroschaltern befestigt ist und auf der anderen Seite über
ein kurzes Stück Schnur von einem Servo-Motor (hier ein nicht
umgebauter Servo mit Rückstellung !) hochgezogen und gegen die
Kontakte gepreßt wird. Damit die beiden Kontakte nicht
gleichzeitig ausgelöst werden sondern wie der normale
Kameraauslöser beide Kontakte kurz hintereinander auslöst habe
ich das Auslöseblech leicht verdreht, so daß es zuerst gegen
den einen Kontakt und erst dann gegen den zweiten Kontakt
drückt. Da die Servo-Motoren recht kräftig sein können und
dieses Blech sich durch den Druck auf die Schalter nicht
zurückbiegen kann wird zwischen Servo und den Mikroschaltern
eine kleine Feder in die Schnur geknotet die einen zu starken Zug
abfängt. Der Auslöser einer handelsüblichen aktuellen
Kamera hat normalerweise zwei Kontakte: Durch leichtes Antippen
des Auslösers wird der Autofocus und die Belichtung aktiviert.
durch festes Durchdrücken des Auslösers wird die eigentliche
Aufnahme ausgelöst. Diese zwei Kontakte habe ich über drei
Drähte durch direktes Einlöten in die Kamera über eine
Steckverbindung nach aussen geführt. Die Aufgabe der beiden
Kontakte übernehmen nun zwei Microschalter, die nebeneinander
fest an die KAP geschraubt wurden. Um diese Kontakte
ferngesteuert auszulösen sitzt ein kleines Blech unter den
Schaltern, das auf der einen Seite über ein kleines Gelenk an
den Mikroschaltern befestigt ist und auf der anderen Seite über
ein kurzes Stück Schnur von einem Servo-Motor (hier ein nicht
umgebauter Servo mit Rückstellung !) hochgezogen und gegen die
Kontakte gepreßt wird. Damit die beiden Kontakte nicht
gleichzeitig ausgelöst werden sondern wie der normale
Kameraauslöser beide Kontakte kurz hintereinander auslöst habe
ich das Auslöseblech leicht verdreht, so daß es zuerst gegen
den einen Kontakt und erst dann gegen den zweiten Kontakt
drückt. Da die Servo-Motoren recht kräftig sein können und
dieses Blech sich durch den Druck auf die Schalter nicht
zurückbiegen kann wird zwischen Servo und den Mikroschaltern
eine kleine Feder in die Schnur geknotet die einen zu starken Zug
abfängt.
Das Einlöten der Auslösekabel in die Kamera ist vielleicht eine
etwas brachiale Methode hat aber den Vorteil, daß Gewicht
gespart wird im Vergleich zu KAPs, bei denen der Servo-Auslöser
uber eine zusätzliche Aluschiene über der Kamera den Auslöser
direkt auslöst.

  Zurück zum Seitenanfang Zurück zum Seitenanfang
| | |